In progress2026RoboticsMechatronicsControls
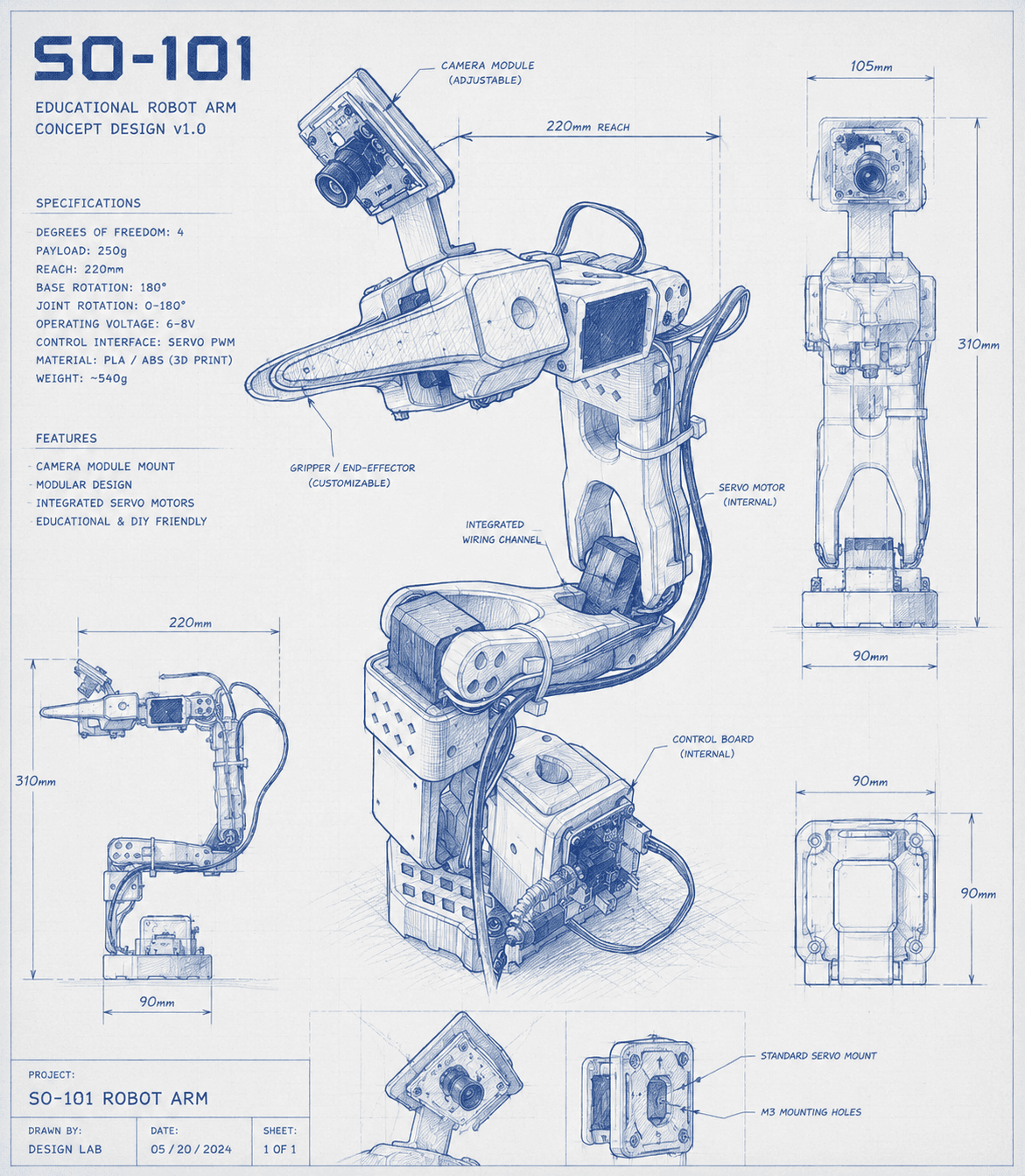
SO-101 Bimanual Robot Arm
A leader-follower bimanual arm built for teleoperation and imitation-learning experiments with Hugging Face LeRobot.
LeRobotFeetech servosPythonSoldering
Role
Build, wiring, calibration, and training
Goal
Build a working leader-follower robot arm and train it to perform manipulation tasks through teleoperation and imitation learning.
Challenge
A bimanual teleoperation system means accurate servo calibration, reliable wiring, and a clean data pipeline before any policy can be trained.
Solution
I am assembling the leader and follower arms, calibrating the servos, and setting up the LeRobot teleoperation and data-collection workflow as the foundation for policy training.
Results
- Build in progress. This page will be updated with calibration, teleoperation, and training results as the project advances.